 DJET
DJET Juillet 2019 ŕ Mars 2020
"L'art le plus complet, c'est celui de construire." Paul Valéry.
DJET
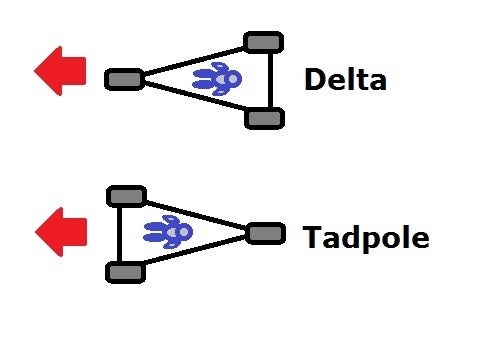
TRIKE DELTA A TRACTION DIRECTE




d






nbsp;


Ce n'est pas un FlevoBIKE (chasse de 60° ) ou un Python ( Chasse négative ) le Djet ŕ 40° de chasse positive choisie suite aux protos des années antérieures et l'expérience ainsi acquise.
Je n'aime pas trop les Deltas Trike au chassis articulé , tilting ou pendulaire qui en fait vont prendre les défauts du deux roues et du trois roues sans en prendre un avantage !!!!
Dans l'ensemble, je me sens bien sur le Djet et son utilisation me parait bien ludique comme je le souhaitais......
tout ŕ fait, on peut dire que l'on incline le guidon plus que l'on le tourne avec cette cinématique , tu penches le guidon comme sur un manche d'avion !!!! et tu peux trčs aisément garder ton cap ou tourner seulement avec les pieds en rotation sur le pédalier, tu flanes en regardant le ciel bleu les mains derričre la tęte comme dans ton transat , elle est pas belle la vie ????
La direction ŕ un angle de 40° et une chasse projetée de 40 mm.
C'est un choix que j'ai expérimenté auparavant sur divers prototypes et qui sont détaillé sur
le site
Ces choix de configuration avec un empattement de 1300 mm ne donne pas un engin maniable bien entendu , mais ce n'était pas mon but ...
Cet engin est d'une grande stabilité pour un delta trike ŕ traction directe..
Suspension AR par un jonc zicral de 20 sur lequel de la matičre est ôtée pour répartir l'effort sur la longueur et trouver la souplesse voulue.
1300mm d'empattement
800mm de voie
chasse 40° chasse projetée 40mm
| FICHE TECHNIQUE | |
| MODELE |
DJET-TD |
| CONFIGURATION |
Trike Delta ŕ traction directe / Roues AV 26 pouces, Roues AR 20 pouces. |
| POIDS |
30 kg.(Complet avec les composants de l'assistance électrique y compris la batterire ). |
|
REPARTITION POIDS AV/AR |
Roue AV > 62 % Roues AR > 38 %. |
| CADRE |
Acier A37 40X27X1.5 assemblés par soudo-brasage et soudure autogčne (chalumeau). |
| DIRECTION |
Moyeu de roue avant , axe de 9mm. |
| SIEGE |
Assise fixe. |
| TRANSMISSION |
1Plateau 46z ou 48 Z RL 6V 14z16z18z21z24z34z. |
| FREINAGE |
Deux freins indépendants sur la roue avant : 2 étriers sur un disque de 203mm |
| DEVELOPPEMENT |
Roue 26x1.5 =2.026m > ( 46Z) 6.65m /5.8m /5.1m /4.43m /3.8m /2.75m. Roue 26x1.5 =2.026m > ( 48Z) 6.94m /6.07m /5.40m /4.63m /4.05m /2.86m. |
| GEOMETRIE |
Pédalier 500 mm, Angle de chasse 40°, chasse 40 mm, empattememt 1300mm, voie 800 mm. |
| PROTECTION |
Appręt en aérosol puis peinture martelée "Hammerite" gris zingué mat. |
contact : Jean-Louis LAINÉ startairlaine@yahoo.fr
L' assistance ŕ neutrons.......
Le coeur du systčme est composé d'un moteur moyeu direct (sans engrenage) brushless, c'est ŕ dire sans collecteur et pourvu de capteurs ŕ effets hall
qui "phase" le fonctionement, le tout piloté par un contrôleur.
Moteur Nine continent RH 205 C > https://www.power-e-bike.fr/fr/

kit vélo électrique 48v max power 2000w 26 pouces roue arričre - Moteur sur jante avec rayons gros calibres : Rh205C 7x9 -230/320 rpm
5 possibilités de choix pour le moteur suivant l'utilisation préférée , voir le tableau ci-dessous

Contrôleur 22 amp avec une batterie de 48V, P= U X I, nous avons 1000 Watts disponible, un cheval et demi, pour alléger les pattes Arričre, c'est amplement suffisant ....eôleu
 Rated Voltage : 36~60 V Phase degree : 120°
Rated Voltage : 36~60 V Phase degree : 120°Le contrôleur est fixé sur le dossier du sičge en alu, qui lui offre un excellent dissipateur thermique qui protčge les 9 mofsets des températures excessives ( 75°C).....

Fonctions :
- power ON/OFF
- Compteur de vitesse,
- distance totale et partielle parcouru,
- niveau de charge de la batterie,
- niveau de puissance de l'assistance,
- 5 niveaux assistance,
- régulateur de vitesse (cruse controle),
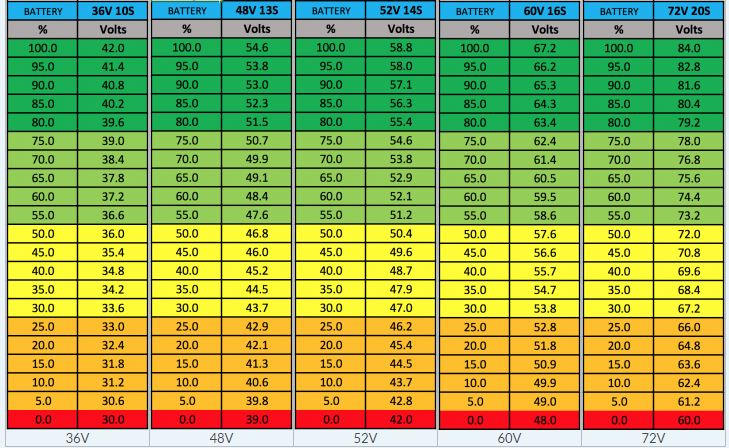
- paramétrable afin de fonctionner avec une batterie 36V , 48V

Accélérateur simple pour multi voltage pour vélo électrique
La batterie.......
gulaireBatterie Softpack 48V

14.25Ah BMS 20A XLR-3 avec 29E - Rectangulaire
Les batteries 48V en softpack, que nous fabriquons ŕ Berlin, ont 2 versions carrées et rectangulaires. Les batteries sont fabriquées dans des porte-piles en plastique. La charge est rendue possible avec un câble spiralé de haute qualité (20 cm - 100 cm) avec un XLR-3 PINS, la décharge est effectuée via un câble de décharge avec connecteur XT90 (mâle). Un fusible de 30A dans un support étanche limite la consommation de courant.
Dans la version carrée, 10 cellules sont utilisées comme côté le plus long (200 mm). Nous fabriquons ce type de batterie dans les formats 13S3P (structure 10 × 4), 13S4P (structure 10 × 6), 13S5P (structure 10 × 7) et 13S6P (structure 10 × 8) etc.
Dans la version rectangulaire, 13 cellules sont utilisées comme côté le plus long (260 mm). Nous fabriquons ce type de batterie dans les formats 13S2P (structure 13 × 2), 13S3P (structure 13 × 3), 13S4P (structure 13 × 4), 13S5P (structure 13 × 5) et 13S6P (structure 13 × 6) etc.
Le BMS (Battery Management System) est toujours monté sur le côté le plus long de la batterie. Ŕ ce stade, la batterie a une épaisseur d'environ 10 ŕ 15 mm.
Nous fabriquons les batteries souples avec isolation FR4, matériaux composites ignifuges et ignifuges constitués de résine époxy et de tissu en fibre de verre. Entre autres choses, FR-4 est utilisé comme matériau de support non conducteur électrique pour les cartes de circuits imprimés électriques.
Dans cette batterie, nous avons un indicateur de niveau LED (vide / 25% / 50% / 75% / plein). Il est situé sur le côté supérieur de la batterie.
|
Spécifications techniques Cellule Li-ion: Samsung SDI INR18650-29E Tension (nominale): 48 V (46,8 V - 48,1 V) Capacité: 14,25 Ah Énergie: environ 685 Wh Configuration: 13S5P (construction: 13 × 5) Résistance interne: <75 mOhm Tension de charge: 54,6 V Tension de décharge finale: 39V Courant de décharge continu: 20A = 950 watts Courant de décharge de 5 secondes: 30A = 1440 watts Poids: environ 3,55 kg. Connecteur de charge: XLR-3 (3 broches) Connecteur de décharge: XT-90
|
Tension de la batterie: 48V Chimie de la batterie: Li-ion Cellule de batterie: INR18650-29E Capacité de la batterie (plage): 15Ah - 20Ah BMS: 20A Configuration de la batterie: 13S5P Version softpack: Rectangulaireire |
Conseils d'utilisation d'une batterie.......
Il est conseiller d'utilise la moitier de la decharge max de la batterie...
Pour la durée de
vie des pack en li-ion il y a donc
les cellules hautes énergie qui ont une durée de vie bien meilleur mais
pour que ce soit le cas il faut un chargeur pouvant ne pas recharger ŕ 100%
comme un cycle satiator.
Globalement il faut stocker la batterie dans les 30-40%, la chargé ŕ 80 ou 90% avant de
l'utiliser et faire un équilibrage tous les 20 cycles environs (donc la charger
ŕ fond trčs trčs lentement).
En faisant ça et en ne descendant jamais sous les 20% la durée de vie est doublé au
minimum.
Combien de temps dois-je laisser le pack branché?
Vous devriez le laisser branché jusqu'ŕ ce
qu'il soit chargé ou peut-ętre un peu avant qu'il ne soit complčtement chargé,
de maničre optimale, vous voulez qu'il soit dans une plage de pourcentage de
tension / charge égal ŕ quelque chose comme 80 ŕ 90%, peut-ętre un peu plus bas
si vous le stockez pour longtemps comme pendant l'hiver. Cela l'optimisera
pour la plus longue durée de vie du cycle. Vous pouvez toujours charger ŕ
100% juste avant un trajet, car cela n'affecte pas beaucoup les cellules, il
s'agit plus de ne pas laisser la cellule ŕ 100% pendant une longue période de
temps plutôt que de ne jamais la laisser atteindre ce niveau de charge.
https://en.wikipedia.org/wiki/Tilting_three-wheeler
Comparatif tapdole ( TETARD) et delta : ( traduction Google)
https://www.instructables.com/id/Engineering-A-3-Wheel-Vehicle-Chassis/
Premičre voiture 1974 > MATRA DJET 5.

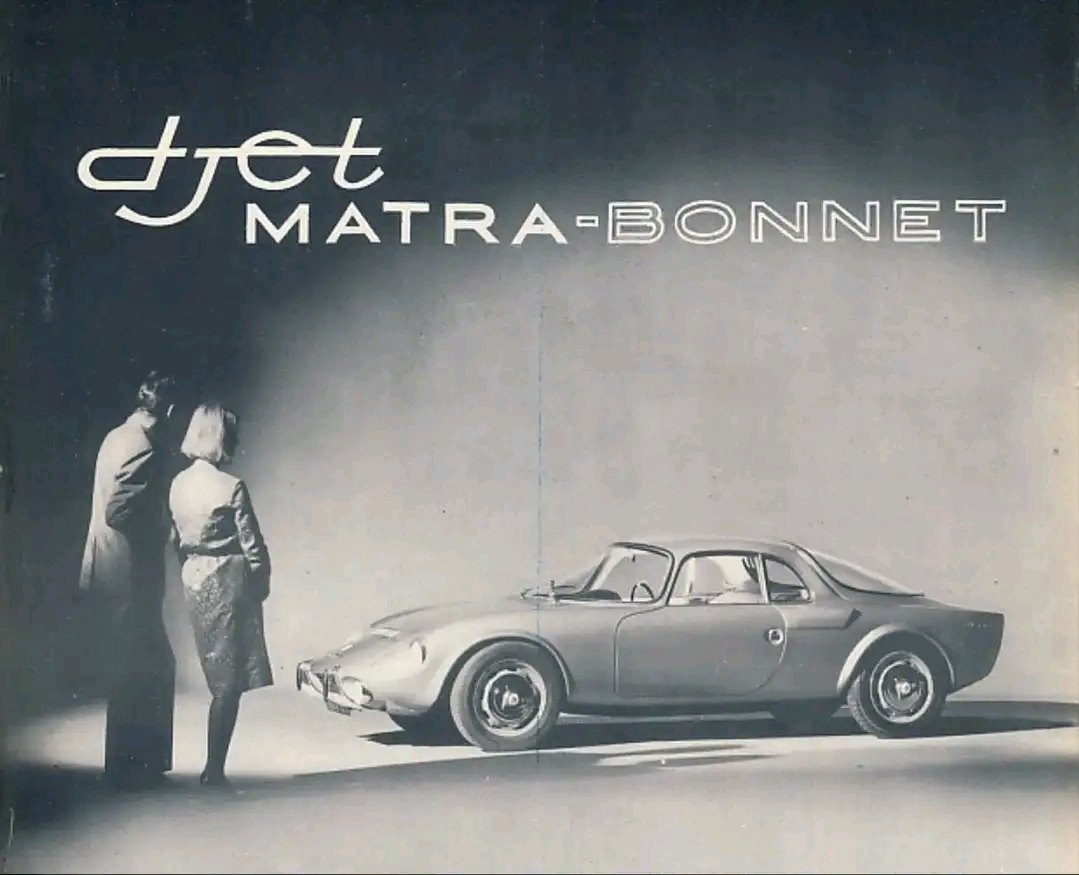
https://www.club-djet.com/histoire/1964.html
https://www.petites-observations-automobile.com/2019/07/41985.html
